Project 4: Bolloré Logistics — Technical Documentation
Technical deep dive into the Modular Assembly Line (MAL) design, hardware fabrications, and software simulations for the Bolloré Logistics Value-Added Services (VAS) automation project. Back to Project Overview.
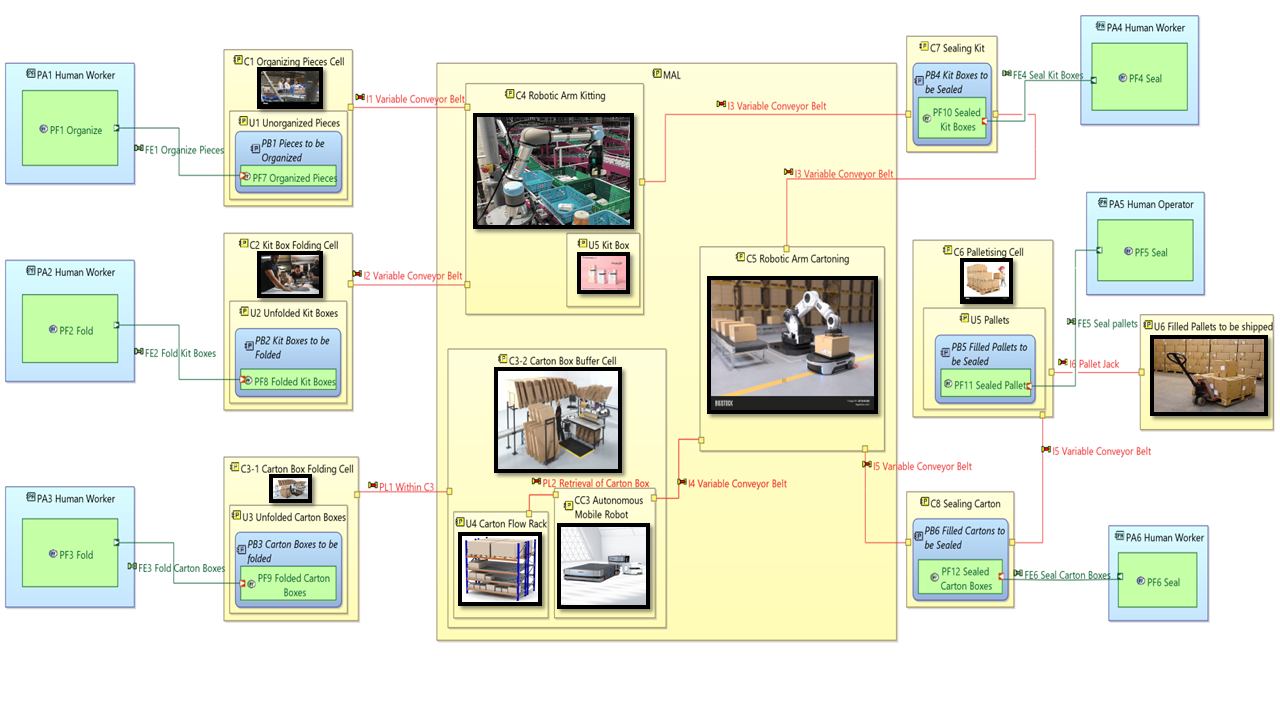
1. System Architecture (Arcadia & Capella)
To address the bottleneck in High Mix Low Volume (HMLV) kitting processes, we migrated from the legacy Assembly Line (AL) layout to a Modular Assembly Line (MAL).
We utilized Arcadia and Capella methodologies to systematically define the operational architecture. The MAL architecture decouples the kitting and cartoning stations using an intermediate Autonomous Mobile Robot (AMR) for transport, significantly reducing reliance on manual material handling and increasing system scalability.
2. Hardware Prototyping & Fabrications
LIMO AMR Interface & Servo Control
The AgileX LIMO was selected as the AMR to bridge the gap between kitting and cartoning stations. A custom mechanical interface was designed to hold the payload. During development, the design evolved from using bulky linear actuators to a more refined servo motor-driven flap system.
- Microcontroller: An STM32F303RE MCU processes the logic to actuate the servo motors, dynamically opening and closing the flaps to drop off carton boxes at the target station.
- Fabrication: Custom mounts were 3D-printed to securely interface the STM32 and servo mechanism onto the LIMO chassis.
Vacuum End-Effector (UR10)
For the UR10 robotic arm to perform reliable kitting (pick-and-place), a custom vacuum gripper was engineered:
- A DC vacuum motor and external air compressor provide the necessary suction force to handle various HMLV SKUs.
- A bespoke Vacuum Motor Housing was modeled in SolidWorks and fabricated to mount seamlessly onto the UR10 end-effector plate.
Variable Conveyor Belt
To simulate variable throughput, a Variable Conveyor Belt system was designed and fabricated. This conveyor can dynamically adjust its speed to handle different volume loads typical of the Bolloré VAS operations.
3. Software & Robotics Control
ROS2, MoveIt2 & Gazebo Simulation
The entire automation sequence was first validated in simulation to ensure safety and reachability before deploying to real hardware.
- Gazebo: Used to simulate the physics of the UR10 arm, conveyor belts, and LIMO AMR within the virtual Bolloré warehouse environment.
- MoveIt2 (ROS2): Utilized for trajectory planning, collision avoidance, and solving inverse kinematics for the robotic kitting and cartoning tasks.
RoboDK Scripting (Physical Deployment)
For the physical demonstration using the real UR10 arm, Python scripts were developed using the RoboDK API. These scripts passed specific joint angles directly to the robot controller to execute the precise pick-and-place trajectories derived from our planning.
from robodk import robolink
import time
RDK = robolink.Robolink()
robot_item = RDK.Item('UR10')
# Target joint angles for kitting operations
joint_angles = [12.61, -37.84, 96.06, 27.87, 88.30, -46.63]
joint_angles2 = [-6.79, -51.43, 113.53, 27.87, 88.30, -46.63]
# Execute trajectory
robot_item.setJoints(joint_angles)
time.sleep(5)
robot_item.setJoints(joint_angles2)4. Visual Components Throughput Simulation
To mathematically prove the productivity improvement, Visual Components software was used to run a side-by-side throughput analysis of the original Assembly Line (AL) vs. the new Modular Assembly Line (MAL).
- The simulation confirmed a net positive throughput increase when utilizing the UR10 for kitting and the LIMO for transport, successfully meeting the core project objective of reducing human reliance while boosting efficiency.