CubeSat Building Workshop (SpaceFaculty)
Project Overview
A comprehensive 1U CubeSat workshop conducted by SpaceFaculty, focusing on the end-to-end integration of satellite avionics. The project involves building three distinct Arduino-based subsystems that communicate securely over LoRa.
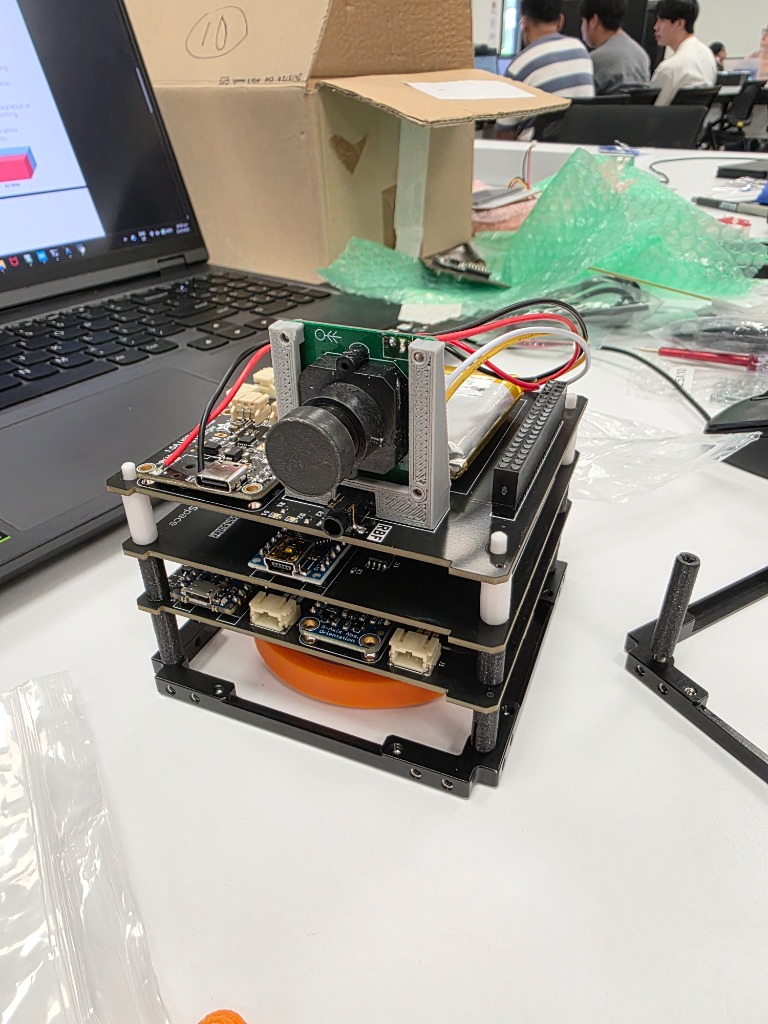
Internal Avionics Stack
Antenna Deployment
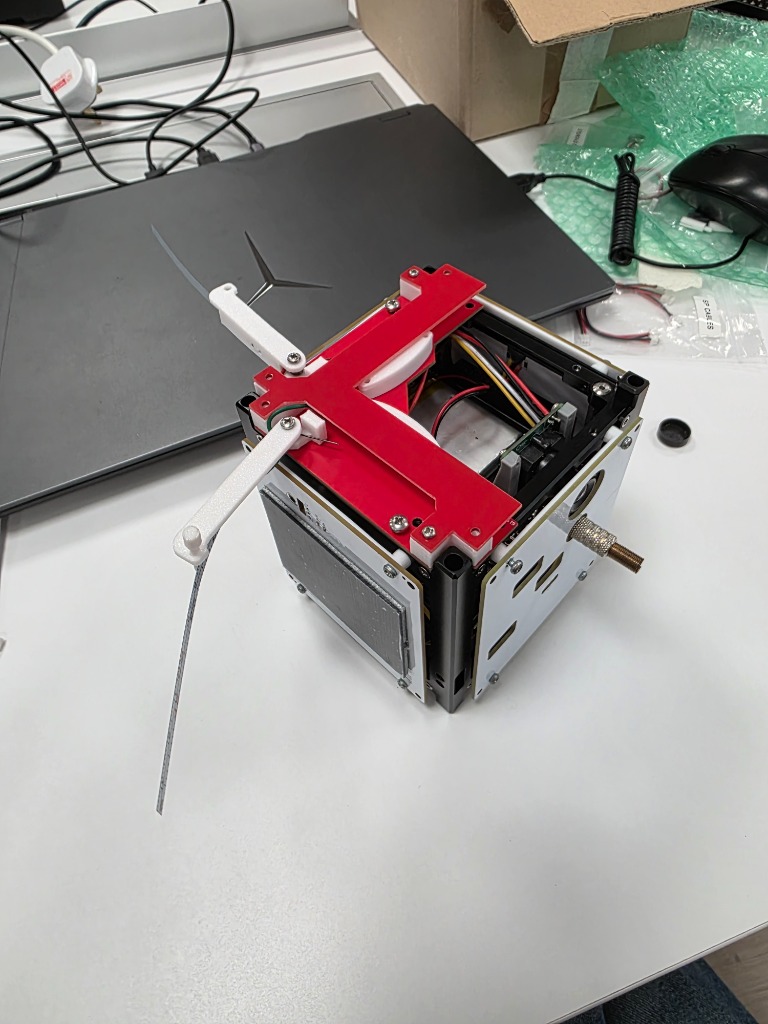
Solar Panels

Vision System & Power

Conceptual Illustration

*Note: The image above is a photorealistic rendering for illustration purposes, depicting how the fully deployed 1U CubeSat might look in orbit.
This hands-on workshop organized by SpaceFaculty challenged participants to build a functional 1U CubeSat avionics stack from scratch. The system comprises three independent nodes — Ground Station (GS), On-Board Computer (OBC), and Attitude Determination and Control System (ADCS) — each running on an Arduino and communicating wirelessly over LoRa radio at 434 MHz.
Mission Analysis (GMAT)
Prior to hardware integration, we utilized the General Mission Analysis Tool (GMAT) to validate the satellite's operational feasibility. This comprehensive analysis included:
- Orbit Design: Defining Low-Earth Orbit (LEO) parameters optimized for specific mission objectives.
- Coverage Analysis & Groundstation Visibility: Simulating communication windows to ensure reliable telemetry downlink and command uplink during overpasses.
- Lifetime Estimation: Analyzing orbital decay factors, such as atmospheric drag, to estimate the 1U CubeSat's functional lifespan before deorbiting.
System Architecture
The three-node architecture mirrors real satellite subsystem design:
- Ground Station (GS): Sends authenticated commands to the OBC via LoRa, receives telemetry and camera images, validates token-based security handshakes
- On-Board Computer (OBC): Central hub that aggregates sensor telemetry, routes commands to the ADCS, captures camera images with chunked binary LoRa transmission, and manages asynchronous pass-through command routing
- ADCS: Attitude determination using an IMU, sun sensors, and GPS (with NMEA parsing). Controls a reaction wheel via a PID sun-pointing controller with shake-override safety logic
Key Technical Features
LoRa Communication & Security
- All inter-node communication over 434 MHz LoRa radio
- Token-based authentication: GS must send a valid password token before OBC accepts commands
- Tokenized routing ensures only authorized ground operators can command the satellite
ADCS — Attitude Control
- PID controller for reaction wheel sun-pointing
- IMU-based orientation sensing with gyroscope integration
- Shake-override safety logic: disables reaction wheel if excessive vibration detected
- Sun sensor array for coarse sun vector determination
- GPS module with NMEA sentence parsing for position telemetry
OBC — Data Handling
- Camera image capture with chunked binary transmission over LoRa (handling the limited packet size)
- Sensor telemetry aggregation and periodic downlink
- Asynchronous command routing between GS and ADCS subsystems
Skills & Technologies
Arduino, LoRa 434 MHz, PID Control, IMU Sensors, GPS/NMEA, Satellite Systems, Embedded C++, Wireless Communication